X軸ユニット 組立
solid v wheelユニット 組立
まずはじめに、solid v wheelユニットを組み立てます。
部品表

| 部品 | 詳細 | 数量 |
|---|---|---|
| solid v wheel | プラスチック | 4 |
| ベアリング | 625-2RS | 8 |
| solid v wheel用シム | — | 4 |
| M5×40 六角穴付ボルト | ステンレス製 | 2 |
| M5×30 六角穴付ボルト | ステンレス製 | 2 |
solid v wheellユニット組み立て
solid v wheelを組み立てます。
solid v wheel 1個の組み立てには以下の部品が必要です。(上記部品表に含まれます。)
- solid v wheel
- ベアリング×2
- solid v wheel用シム
- M5×40 六角穴付ボルト or M5×30 六角穴付ボルト

solid v wheelの片側にベアリングを押し込みます。しっかりと最後まで押し込んでください。

こちらは片側を挿入した状態です。

M5×40六角穴付ボルトをベアリングを挿入した側から挿入します。

solid v wheel用シムを1個入れます。このシムが2個のベアリングの干渉を防ぎます。

solid v wheelを挿入します。

この状態でsolid v wheelユニットの完成です。同じようにM5×40 六角穴付ボルトとM5×30 六角穴付ボルトを使って4個組み立てます。

X軸モーター・フレームユニット組立
部品表
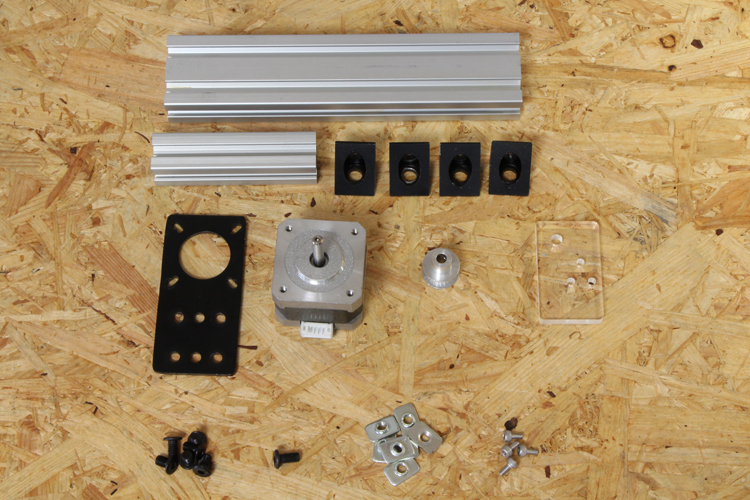
| 部品 | 詳細 | 数量 |
|---|---|---|
| 177mm アルミフレーム | 標準 20mm*40mm | 1 |
| 80mm アルミフレーム | 標準 20mm角 | 1 |
| Black Angle Corner Connector | アルミ製 | 4 |
| Motor Mount Plate | アルミ製 | 1 |
| ステッピングモーター | NEMA17 | 1 |
| タイミングプーリー | GT2 20歯 穴径:5mm | 1 |
| carrier mount x-axis | アクリル | 1 |
| M5×8 低頭ボルト | — | 6 |
| M5 Tナット | 先入れナット | 7 |
| M5×10 低頭ボルト | — | 1 |
| M3×6 六角穴付ボルト | ステンレス製 | 4 |
X軸モーターユニット組立
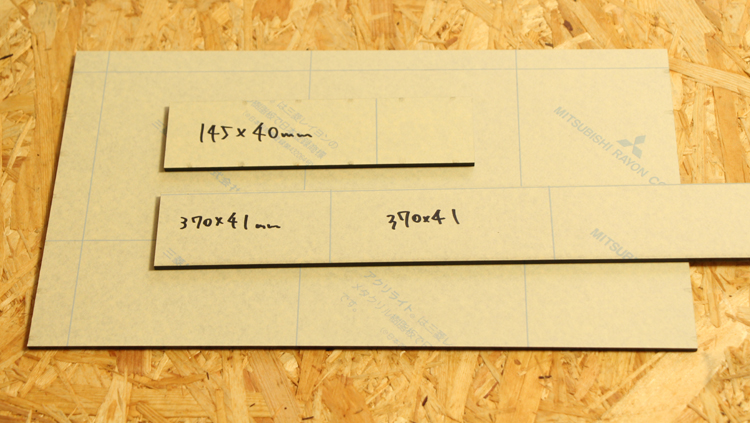
X軸モーターユニット・フレームユニットの組み立てには付属のアクリルを使用します。
- アクリル(大)
- 370*41mm
- 145*40mm
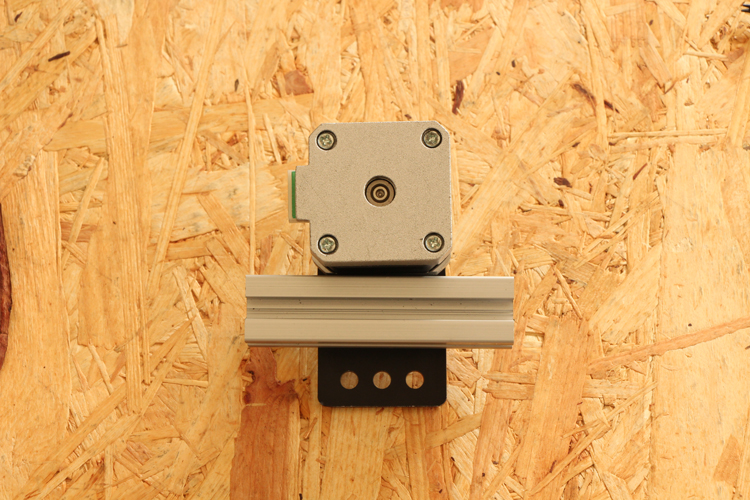
ステッピングモーターにMotor Mount PlateをM3×6 六角穴付ボルトで取り付けます。
ステッピングモーターのコネクタの向きに注意してください。

ステッピングモーターにタイミングプーリーを取り付けます。後の工程で位置は調整します。※取り付ける前に、タイミングプーリーのイモネジを緩めてから取り付けてください。
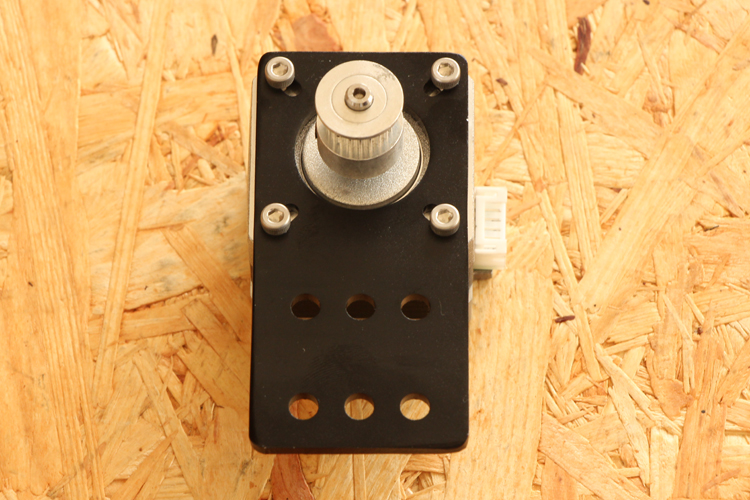
Motor Mount Plateに80mm アルミフレームをM5 TナットとM5×8 低頭ボルトで取り付けます。
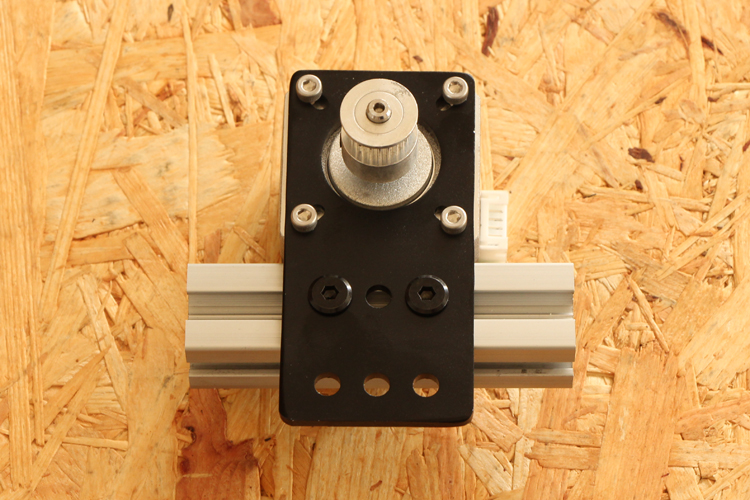
ステッピングモーターと80mm アルミフレームは接地しないように注意してください。
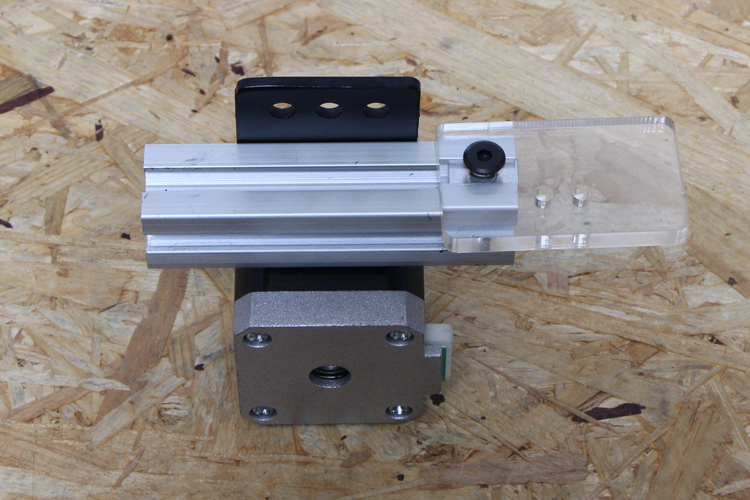
X軸フレームユニット組立
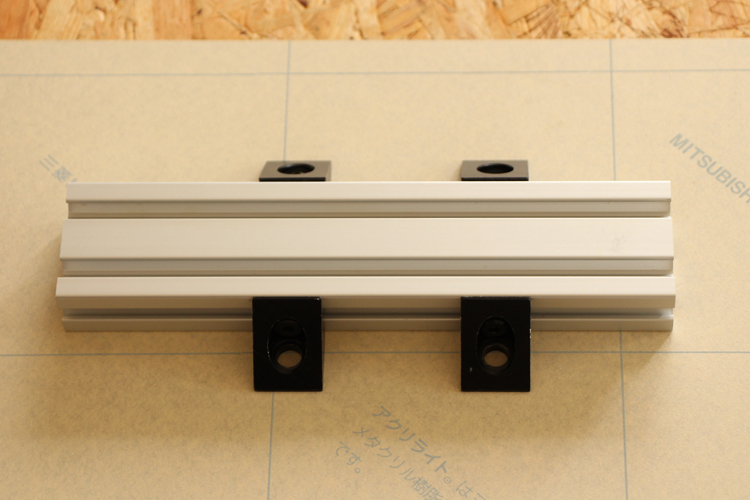
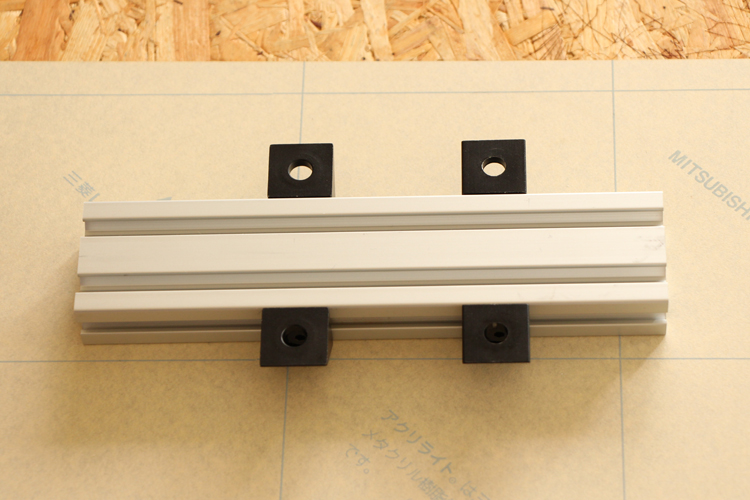
177mm アルミフレームにBlack Angle Corner Connectorを取り付けます。
アルミフレームの下にはアクリル(大)を敷いてください。
370*41mmアクリルを写真のように177mm アルミフレームの端面に合わせて、Black Angle Corner ConnectorをM5 TナットとM5×8 低頭ボルトで取り付けます。
Black Angle Corner Connectorは、アクリル(大)と370*41mmアクリルに押し付けるように取り付けてください。

先程取り付けたBlack Angle Corner Connectorから、今度は145*40mmアクリルの40mm面を使用して同様にBlack Angle Corner Connectorを取り付けます。

反対側も同様にBlack Angle Corner Connectorを取り付けます。
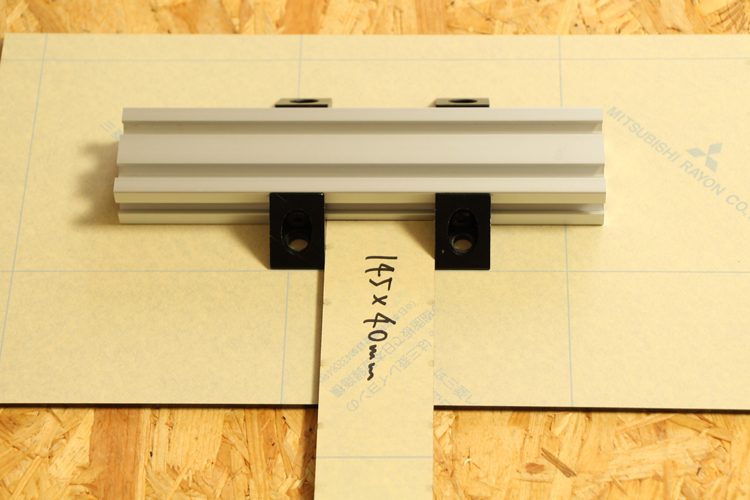
アクリル(大)に押し付けることで、Black Angle Corner Connectorの底面が均一になります。
carrier support x-axisをM5×10 低頭ボルトとM5 Tナットを使って取り付けます。位置は後の工程で調整します。